
题目: 智能聚合物驱动/传感材料与器件
时间:10月17日9:00-11:00
地点:机械与动力工程学院F310会议室
邀请人:张文明教授(振动、冲击、噪声研究所)

报告人简介:
朱子才,西安交通大学机械工程学院,副教授。2002~2013年在西安交通大学学习,获西安交通大学工学博士学位。毕业后在中国科学院苏州纳米技术与纳米仿生研究所、日本产业技术研究所和爱沙尼亚塔尔图大学从事柔性智能材料相关研究,于2016年底回到西安交通大学工作。在研究生期间主要从事离子型电活性聚合物材料(人工肌肉)研究,研究离子型人工肌肉如IPMC材料的驱动机理和物理模型,工艺改进与器件设计;在博士后期间主要从事聚合物基柔性传感材料与器件的研究,尤其是基于离子聚合物材料的压力和摩擦感知;最近开展了一种新型电介质凝胶人工肌肉的工艺与应用研究。在应用物理和工程类国际知名期刊上(J. Appl. Phys.、EPL、APL、Smart Mater. Struct.、J. Phys. Chem. B.等)发表论文共40余篇(SCI收录30余篇),与团队合著2本专著,申请专利20余项。
报告摘要:
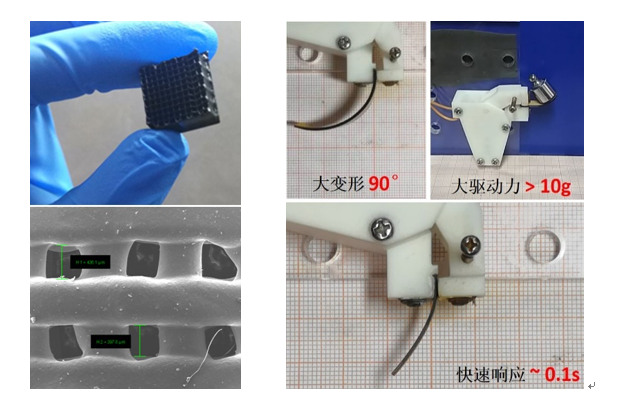
智能聚合物材料在外界激励(电场较为普遍)下,能够产生大的弯曲或者伸缩变形,模拟生物肌肉的变形特征,被称为人工肌肉;相反,有些材料在外界各种力学激励作用下,能够产生电响应,感知外部的变形、压力或者剪切作用,这类材料在仿生机械、医疗器械和消费电子等领域具有广泛应用前景。报告介绍西安交大软机械实验室在各种智能聚合物驱动和传感材料方面的研究,主要包括三个方面的内容:电介质凝胶人工肌肉PVC凝胶——介绍其变形原理和驱动特性,常用的几种驱动器设计,以及实验室在4D打印方面所做的初步研究;低电压IPMC材料——介绍面向水下机器鱼应用实验室在提高IPMC材料的驱动力和体积能量密度取得的初步进展;以及离子聚合物摩擦触觉感知研究——介绍离子聚合物的对压力和摩擦剪切力的感知机理,以及实验室在不同载荷的感知单元结构设计和感知特性方面的实验研究结论。

